What is Robbit ?
Robbit is a open-source cross-platform software which provide 3D simulation environment for multiple robot system. Robbit has been developed thinking in researchers, students, roboticists and hobbyists who want to design, test and simulate mobile robots and research topics like autonomous navigation techniques, obstacle avoidance, artificial intelligence etc.
Robbit enables the users to write their own controllers, modify the environment and, in future release, use sensors in order to test control algorithm and visualize their effects on different types of robots. It is desgined to be simple, modular and extensible for educational purpose.
Robbit has been developed at Industrial Automation Lab, Univ. of Cassino, Italy in collaboration with students from Indian Institute of Technology Kharagpur. See list of all people.
The Name
Well, it so happens that one of us was highly impressed by the Lord of the Rings series especially by resilience of some good-natured hairy-footed creatures called hobbits. And voila! Robbit it was. Robots that Hobbles.
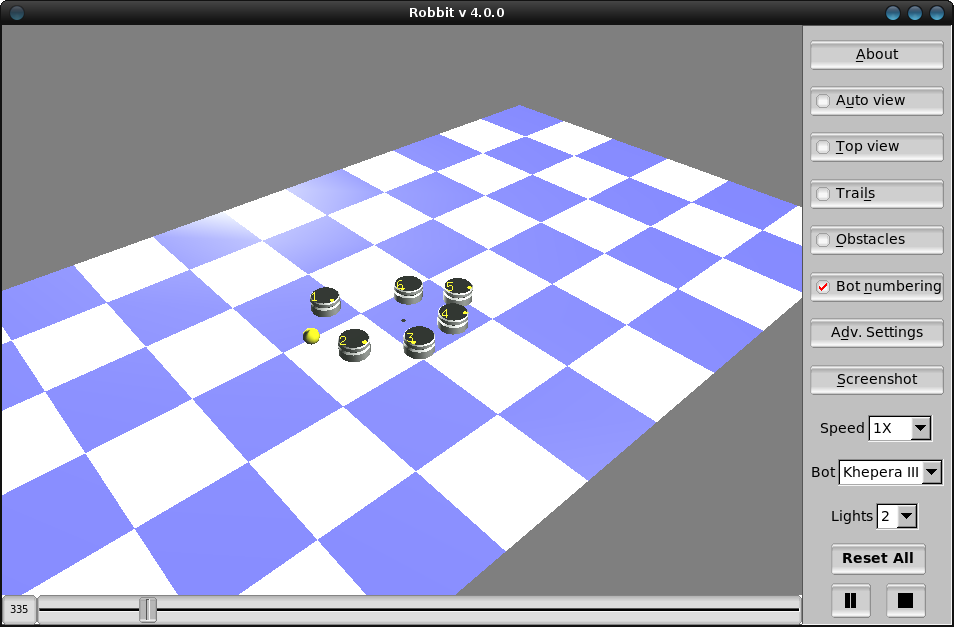
Robbit in action
Following video shows a slighly older version (v3.0 Beta) of Robbit in action.
Conference Paper
Robbit was featured in MATHMOD 2009 - 6th Vienna International Conference on Mathematical Modelling - took place February 11 - 13, 2009. Please cite following conference proceeding if you use Robbit or its derivatives in your work:
Antonelli Gianluca, Arrichiello Filippo, Bhushan Chitresh, Chiaverini Stefano, and Purkayasth Sayandeep, ROBBIT: an Open Source Simulator for Education in Robotics, Proceedings MATHMOD 09 Vienna, I. Troch, F. Breitenecker (ed.); ARGESIM Reports, 35 (2009), ISBN: 978-3-901608-35-3, February 2009, PDF
Abstract: An open source software, named ROBBIT, aimed at the simulation of multiple mobile robots has been developed at the Universita degli Studi di Cassino, Italy together with students coming from the Indian Institute of Technology Kharagpur, India. The main project's objective was to develop a software platform with educational purposes in robotics, computer sciences, non-linear control, behavioral and cognitive sciences. Several potential applications have been identified in order to use this software as a teaching tool for graduate, master thesis and PhD students. ROBBIT is released under the GNU General Public License (GPL).
Features
The simulator can take the pre-saved datafile (ASCII format) to implement offline simulation as well as the code itself to implement online simulation. For both the offline and online situations, simulator provide following features :
- Panaromic view through mouse control
- Pan in 3D
- Instantaneous snapshot
- Play/Pause
- Animation speed control
- Lighting Control
- Zoom In/Out
- On board view
- Placing obstacle (by reading from ASCII file)
- Motion trails
- Numbering Robots
- Collision detection (through colour changes)
- Arena resizing
- Auto-rotating view
- Time-slider when reading from log files
Supported Robots
- Khepera II
- Khepera III
- Custom Robots
Documentation
Detailed documentation is available here. Our old website with more information about prior versions is archived here.
License
Robbit is open source and is distributed under the GNU General Public License, published by the Free Software Foundation (version 3 of the License, or any later version). You can redistribute it and/or modify it under the terms of the GNU General Public License as published by the Free Software Foundation, either version 3 of the License, or (at your option) any later version.
This program is distributed in the hope that it will be useful, but WITHOUT ANY WARRANTY; without even the implied warranty of MERCHANTABILITY or FITNESS FOR A PARTICULAR PURPOSE. See the GNU General Public License for more details.
You should have received a copy of the GNU General Public License along with this program. If not, see http://www.gnu.org/licenses/.
This automatic page generator is the easiest way to create beautiful pages for all of your projects. Author your page content here using GitHub Flavored Markdown, select a template crafted by a designer, and publish. After your page is generated, you can check out the new branch: